- CN
- EN








ZONCN
Servo Drive, Servo Controller, AC Servo Drive, Industrial Servo Drive, High Power Servo Drive, Compact Servo Drive, Modular Servo Drive, Servo Amplifier, Servo Motor Drive, Precision Servo Drive, High Torque Servo Drive, High Speed Servo Drive, Servo Drive System, Servo Drive Module, Servo Motor, Servo Electric Motor. AC Servo Motor, Industrial Servo Motor, Gear Servo Motor, Planetary Gear Servo Motor, Low Noise Servo Motor

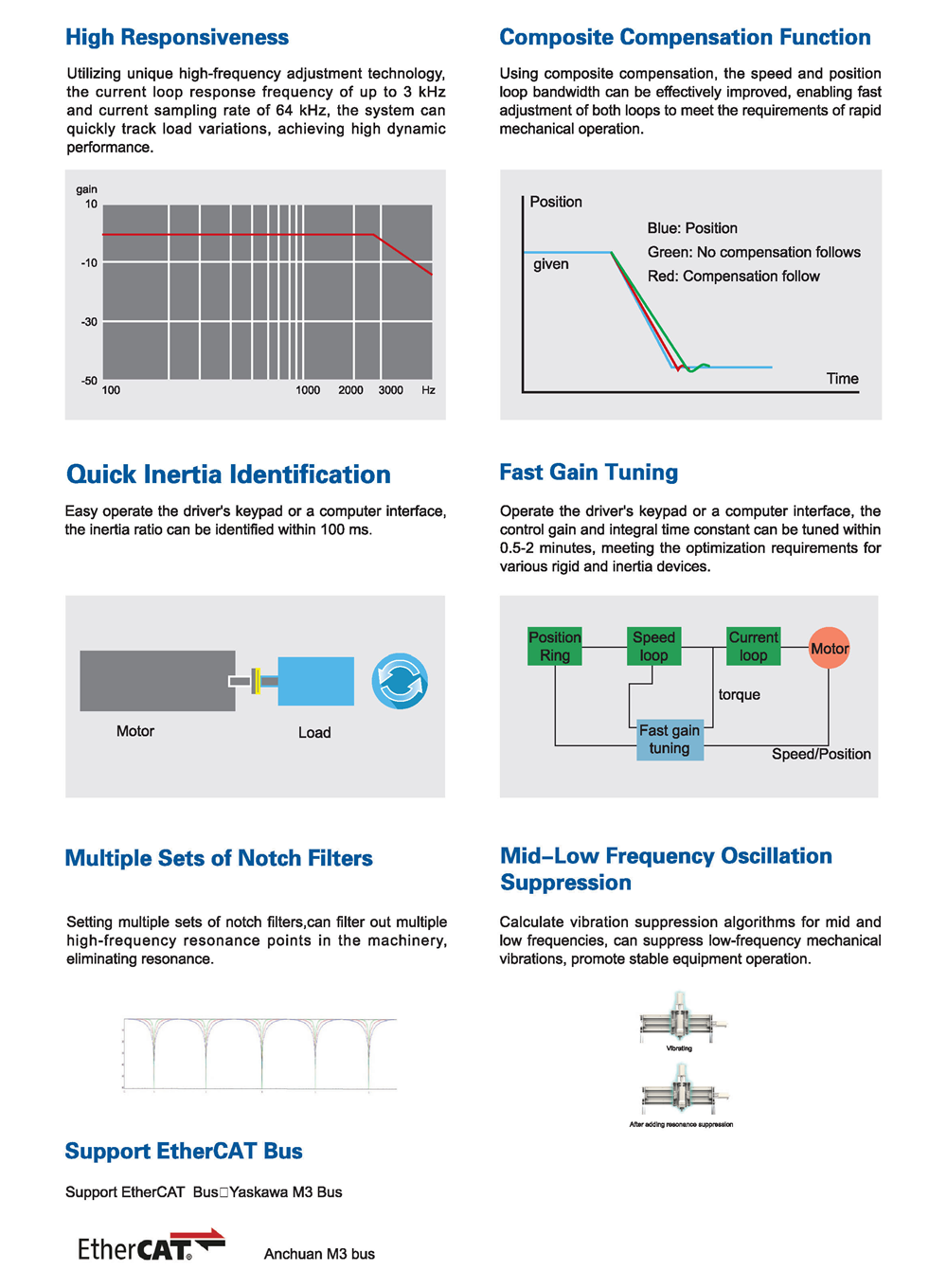
● Multi-function Control
● Position/Velocity/Torque Control
● Electronic Gear Function
● Speed/Torque Limit Function
● Home Search Function
● Zero-Speed Lock Function
● Smooth Speed Command Ramp Function
● Dynamic Brake and Energy Consumption Brake
● Multiple Fault Protection Functions
● Soft Reset Function
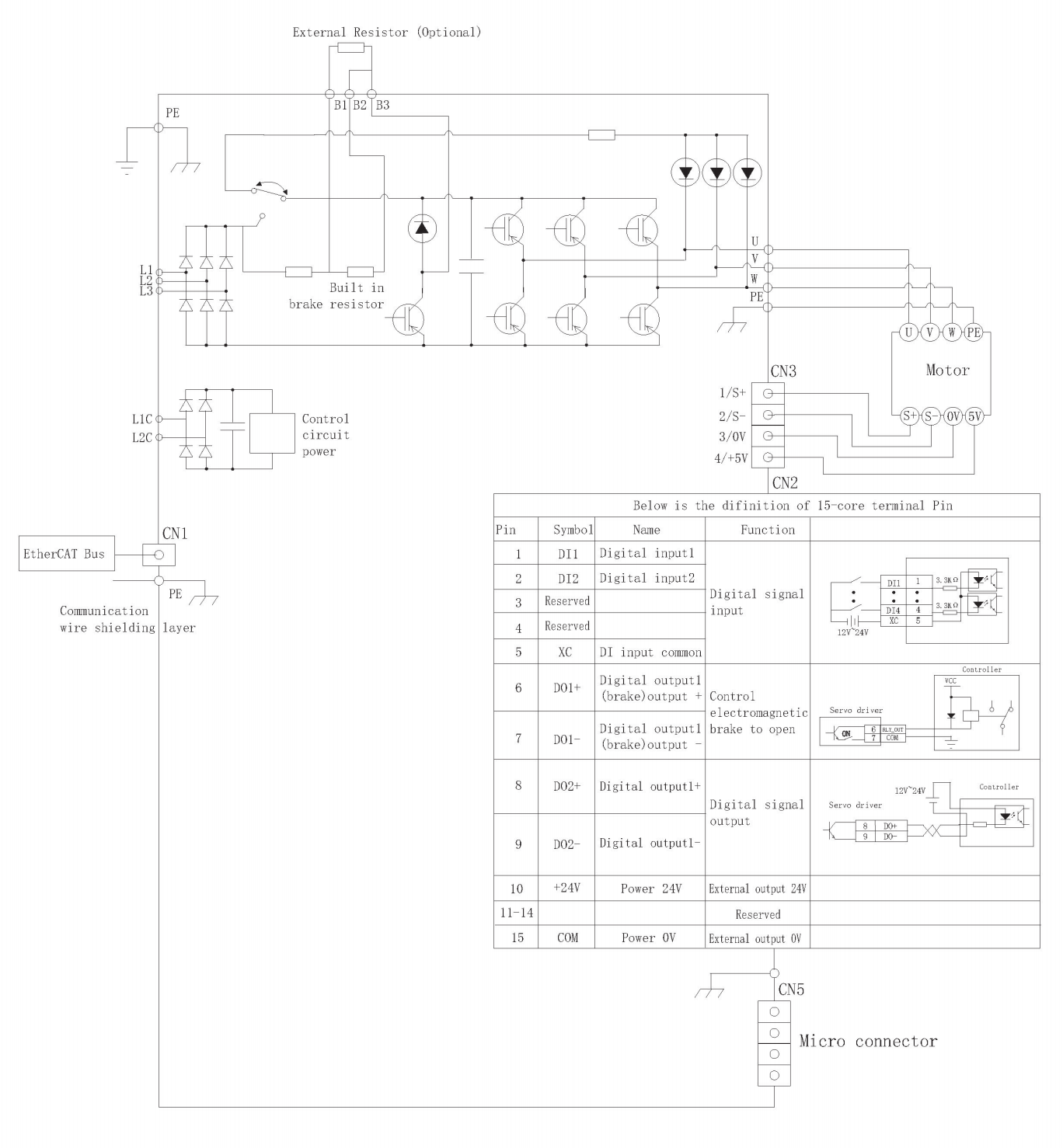
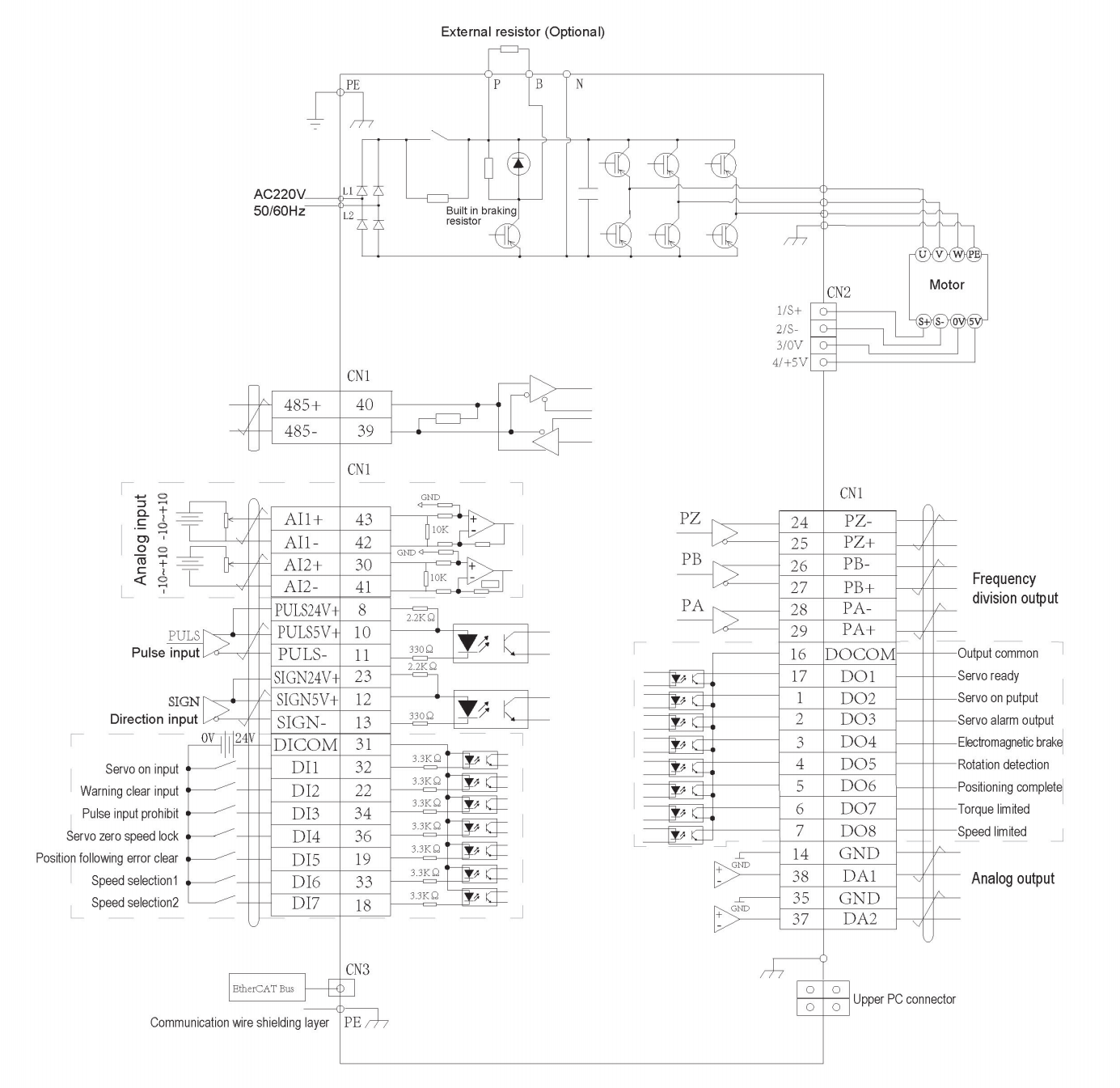
● Support EtherCAT Bus Communication Protocol
● Support Yaskawa M3 Bus Communication Protocol
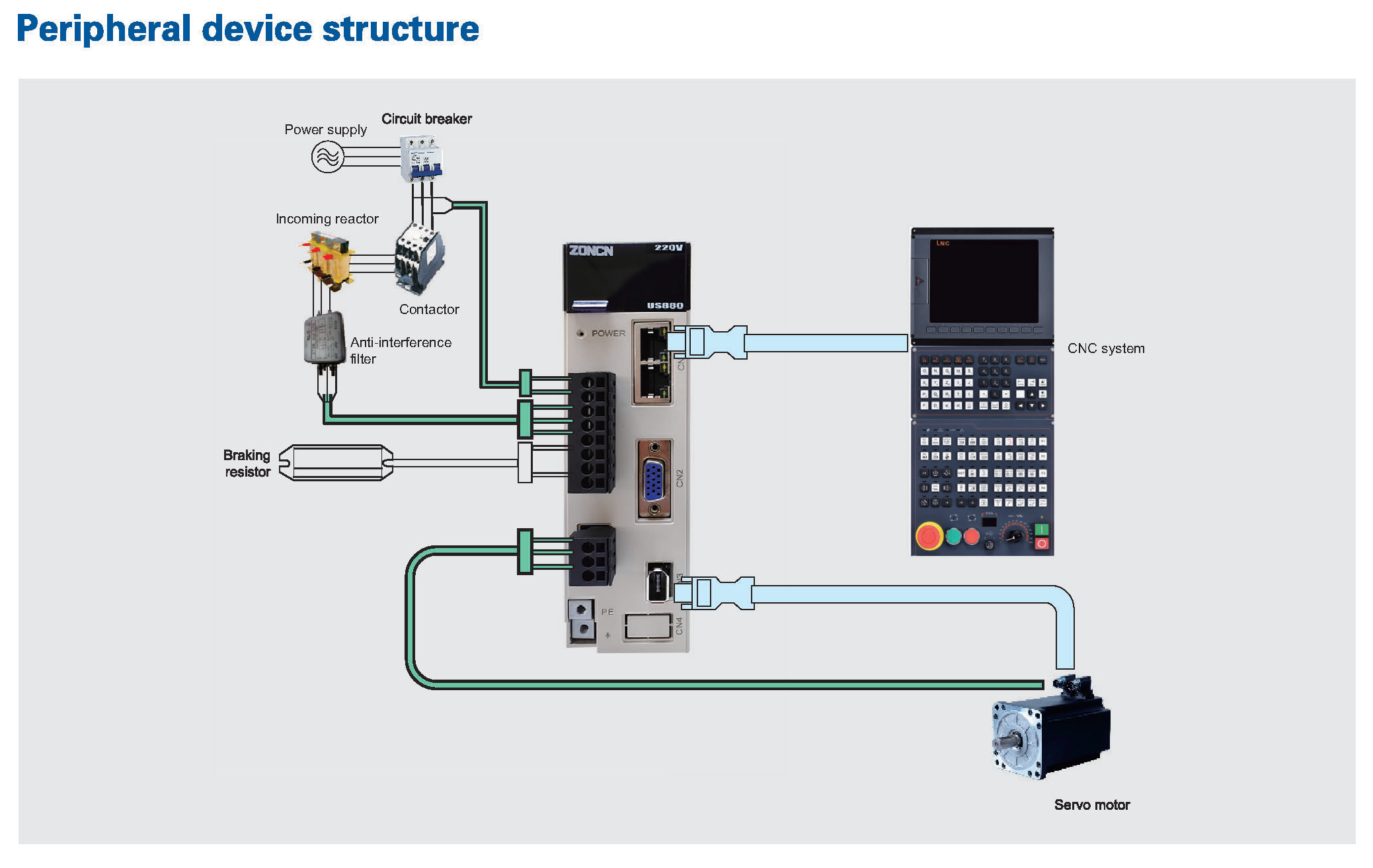
Typical Applications:
CNC lathes: Excellent product quality, high precision, fast speed, smooth surface, smooth and precise contouring of 3Dsurfaces,right angles and straight lines,chip cutting functionality.
Precision engraving machines: High resolution, precise positioning, matching of rotational inertia, high overload capacity. Engraving and milling machines: Good speed stability, high precision, fast response frequency, wide speed range, low-speed high torque.
Engraving machines: Fast speed response, good product smoothness, minimal patterns, smooth curve cutting. Drilling and tapping machines: High-speed and low-speed machining with high precision, wide adjustment range, adaptable to different product requirements.
Machining centers: Rich parameter settings, combined with debugging frequency division coefficients, inertia friction compensation, gain filter, and other parameters to accomplish various complex machining tasks.
① ② ③ ④ ⑤
①ZONCN Servo | ④Product Type: |
AC Servo System | A:Absolute+485 communication; C:Absolute+EtherCAT; D:Absolute+MechatrolinkⅢ; G:Incremental(ABZ) |
②Product series 880:880 Series;810:810 Series | ⑤Voltage: 02:3PH 220V; 04:3PH 380V |
③Rated power 0R2:0.2KW; 0R 4:0.4KW; 0R7:0.75KW; 1R0 :1.0KW; 1R5:1.5KW; 2R 5:2.5KW; 3R0:3.0KW; 4R 0:4.0KW; 5R0:5.0KW; 7R 5:7.5KW; 11:11KW; 15 15KW |
|
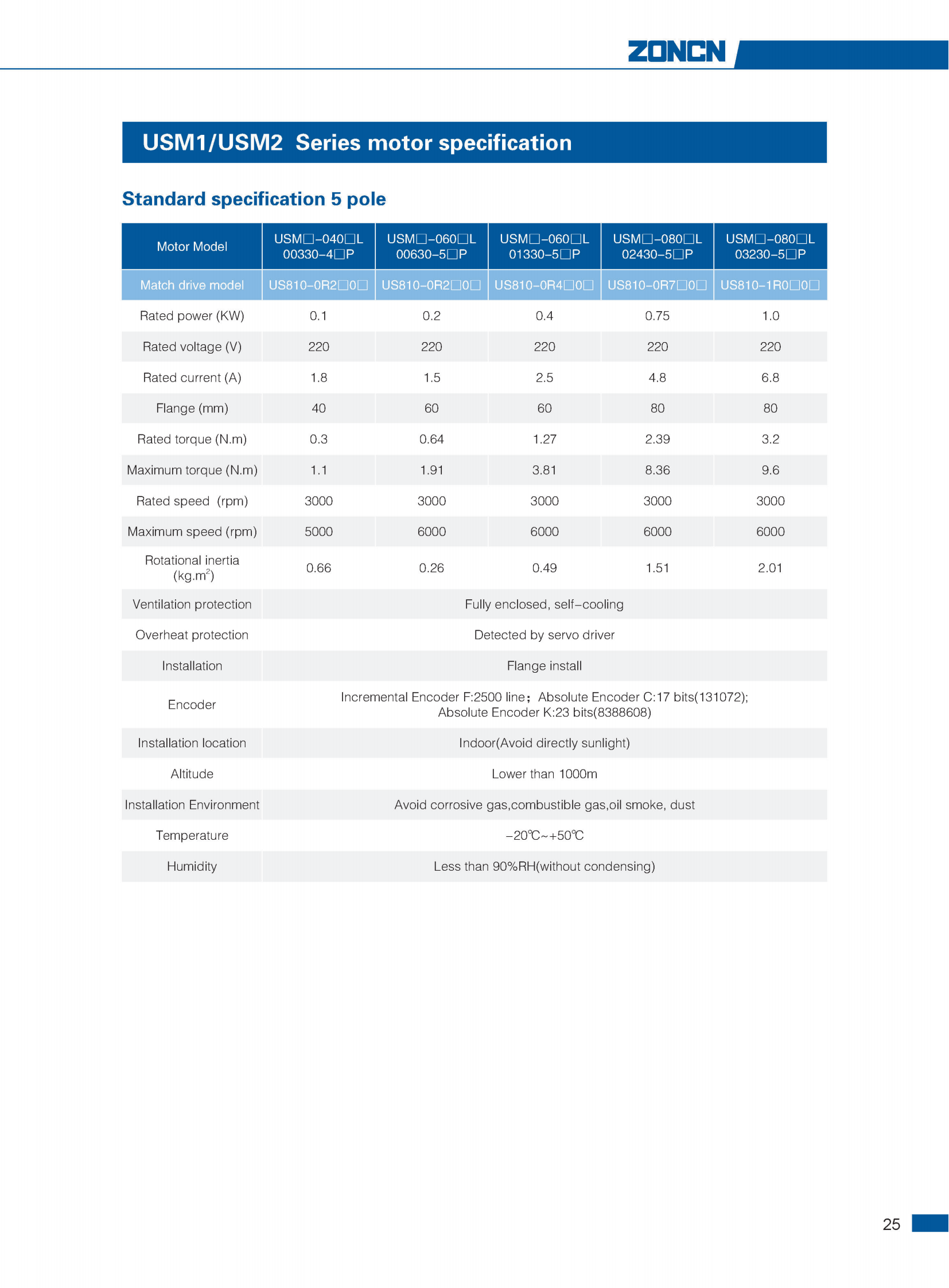
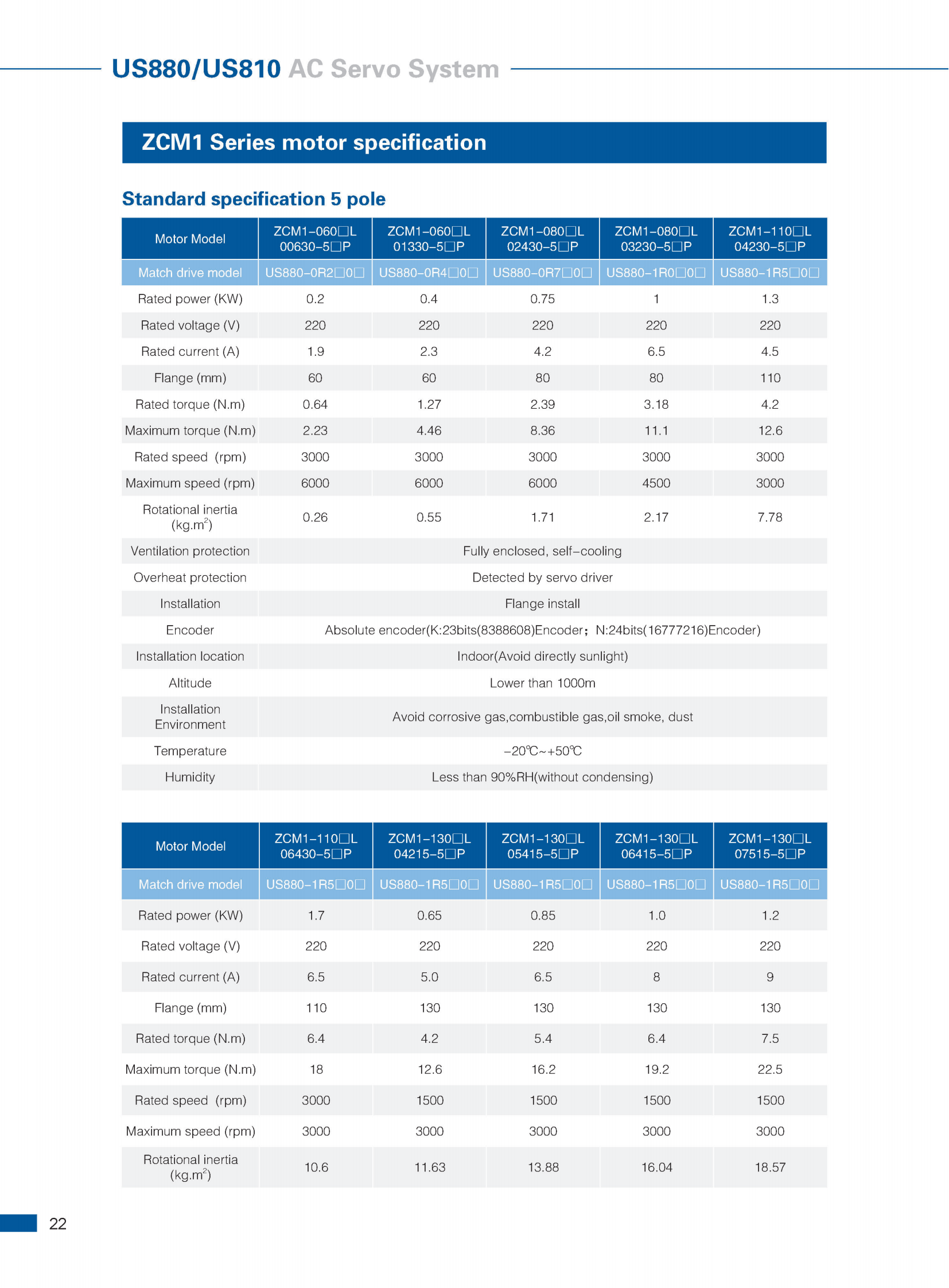
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩
①Series | ⑥Rated torque |
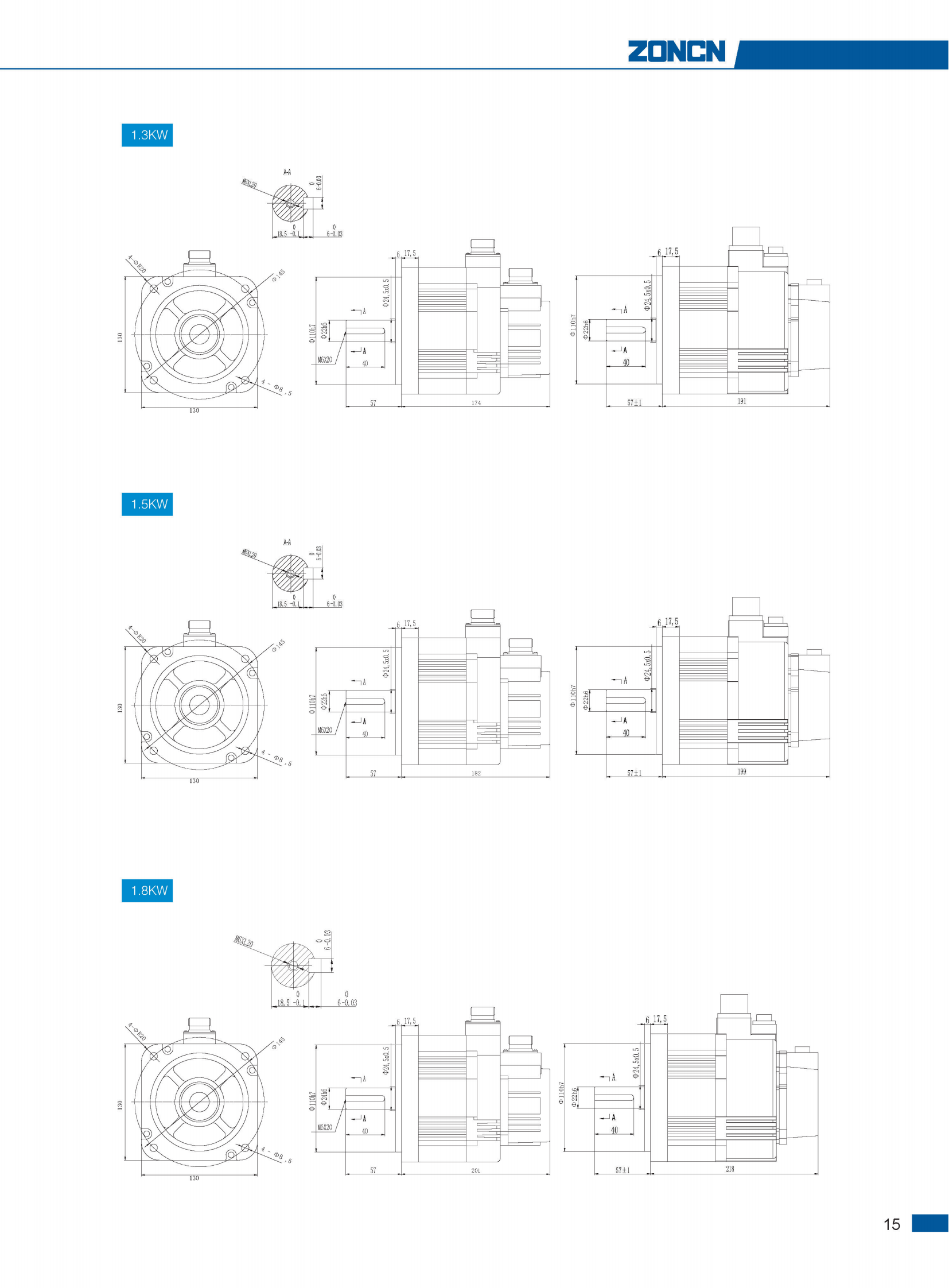
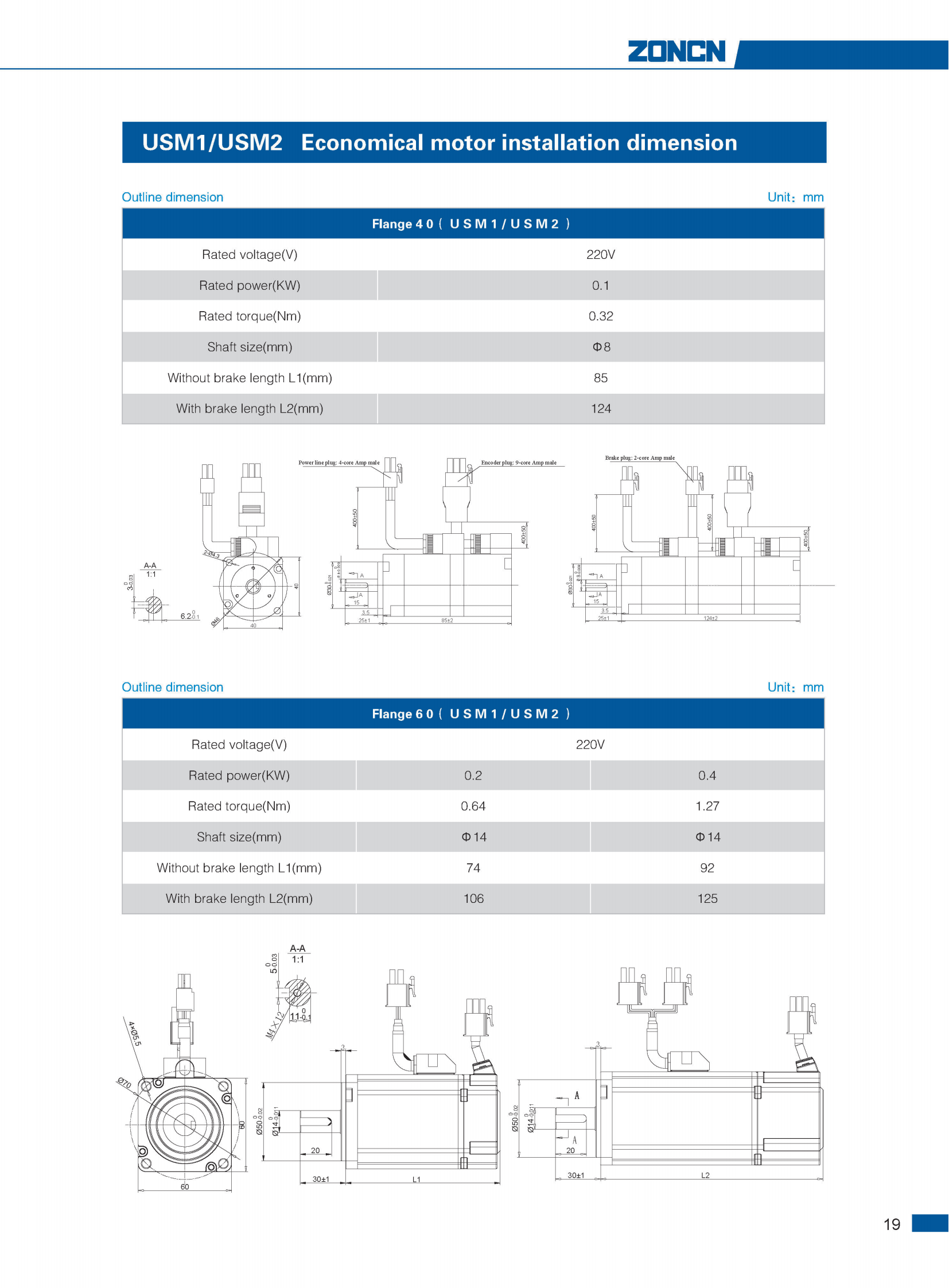
ZC: High performance motor; US: Economic motor | 003: 0.32N.m; 006:0.64N.m; 013 :1.27N.m; 024: 2.39N.m; 032:3.2N.m; 042:4.2N.m; 054:5.4N.m; 060:6N.m; 077:7.7N.m; 083:8.3N.m; 115:11.5N.m; 146:14.6N.m; 186:18.6N.m; 284:28.4N.m; 350:35N.m; 480:48N.m; 830:83N.m; 955:95.5N.m |
②Encoder type M1 :Photoelectric encoder; M2: Magnetoelectric encoder | ⑦Rated speed 15:1500rpm; 20:2000rpm; 25:2500rpm; 30:3000rpm |
③Flange 040:40; 060:60; 080:80; 110:110; 130:130; 180:180; 220:220 | ⑧Polar logarithm 4:4 pole; 5:5 pole |
④Encoder type N:Absolute 24-bit Multi-turn K:Absolute 23-bit Multi-turn K1:Absolute 23-bit Multi-turn Split Type C:Absolute 17-bit single turn C1:Absolute 17-bit Multi-turn | ⑨Brake E:No brake; B: Brake |
⑤Phase/Voltage L:3 phase 220V; S:3 phase 380V | ⑩Waterproof/ Oil seal Y:With oil seal; W: Without oil seal; P:Waterproof and oil seal |
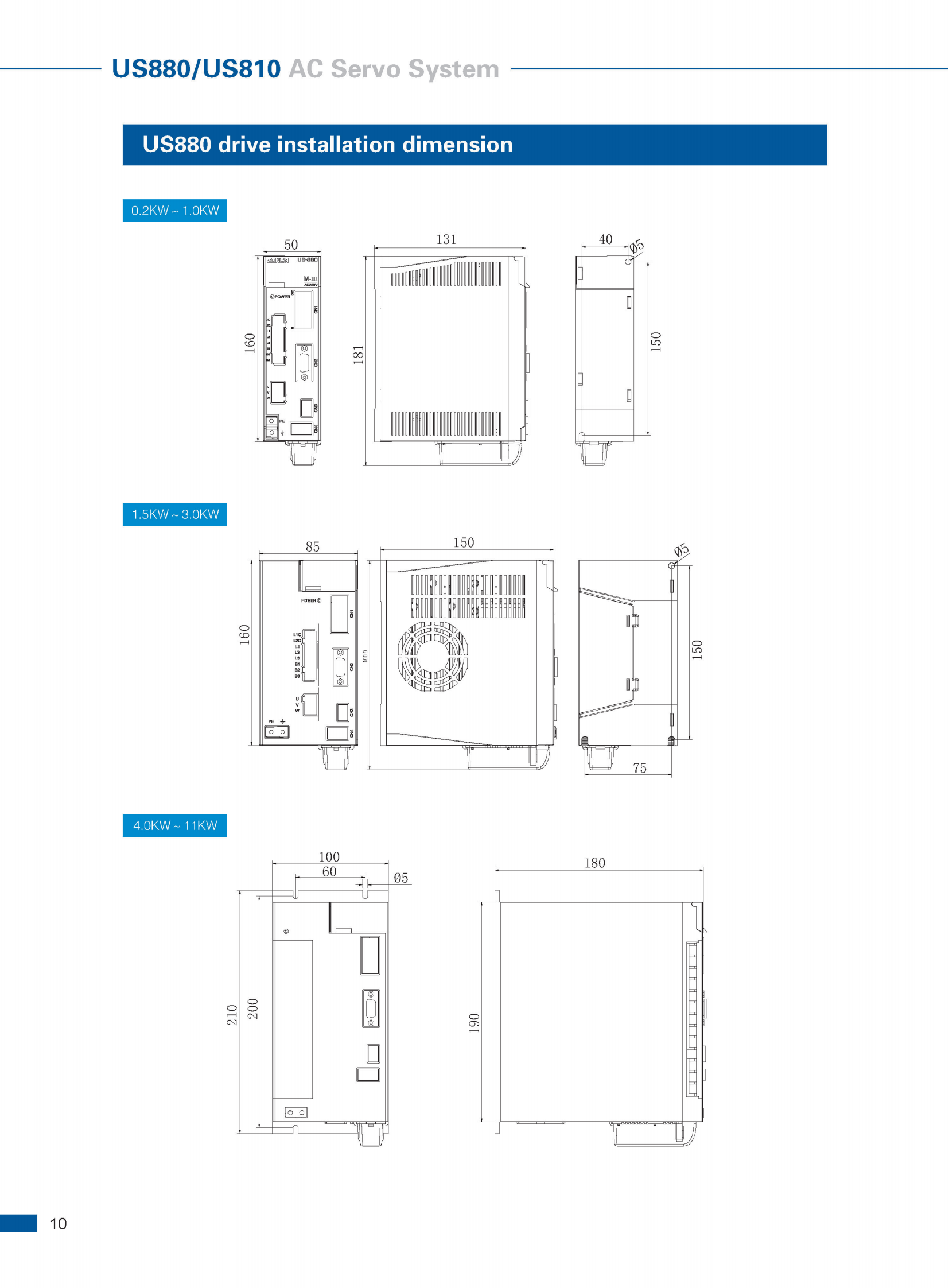
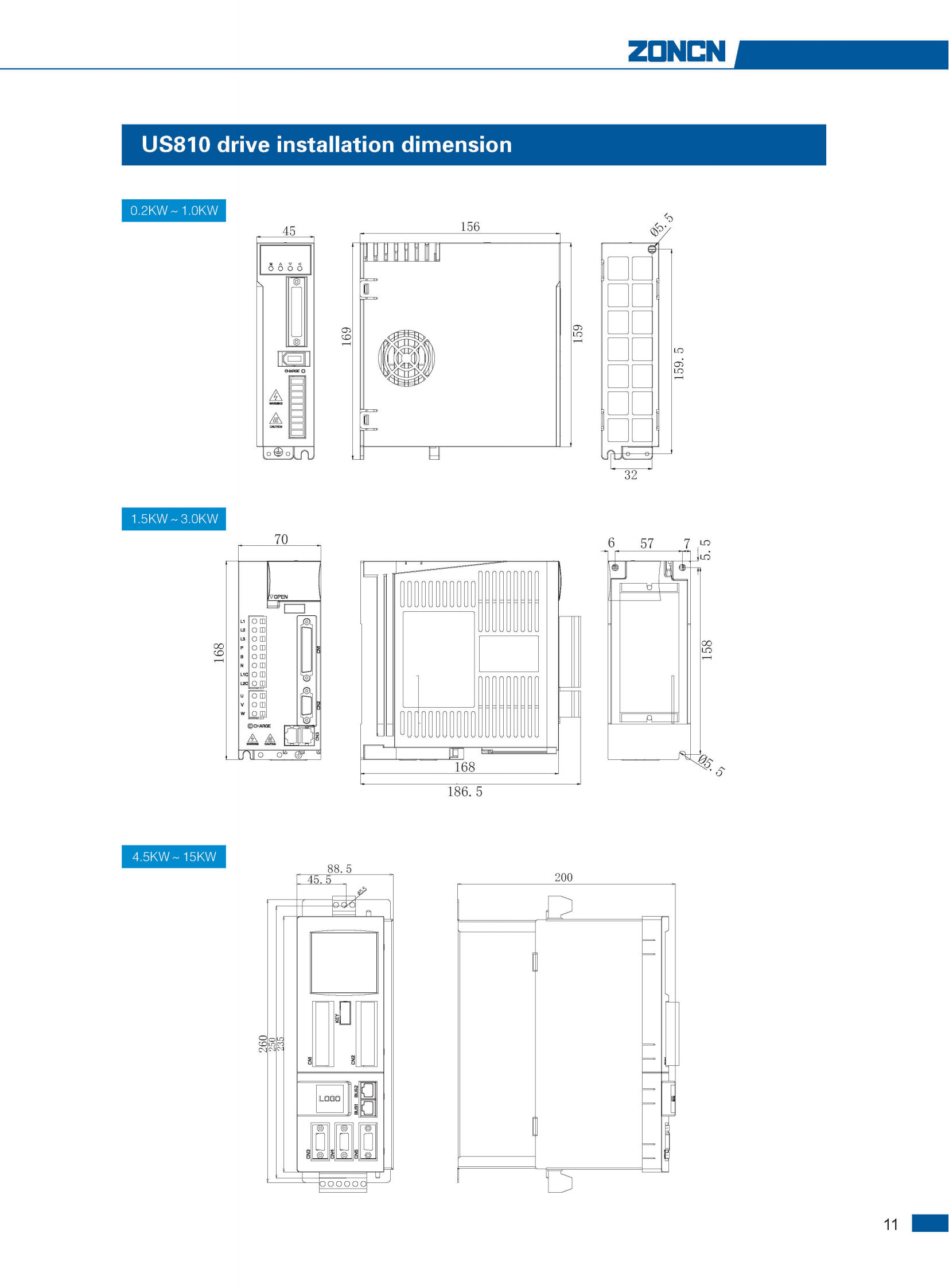
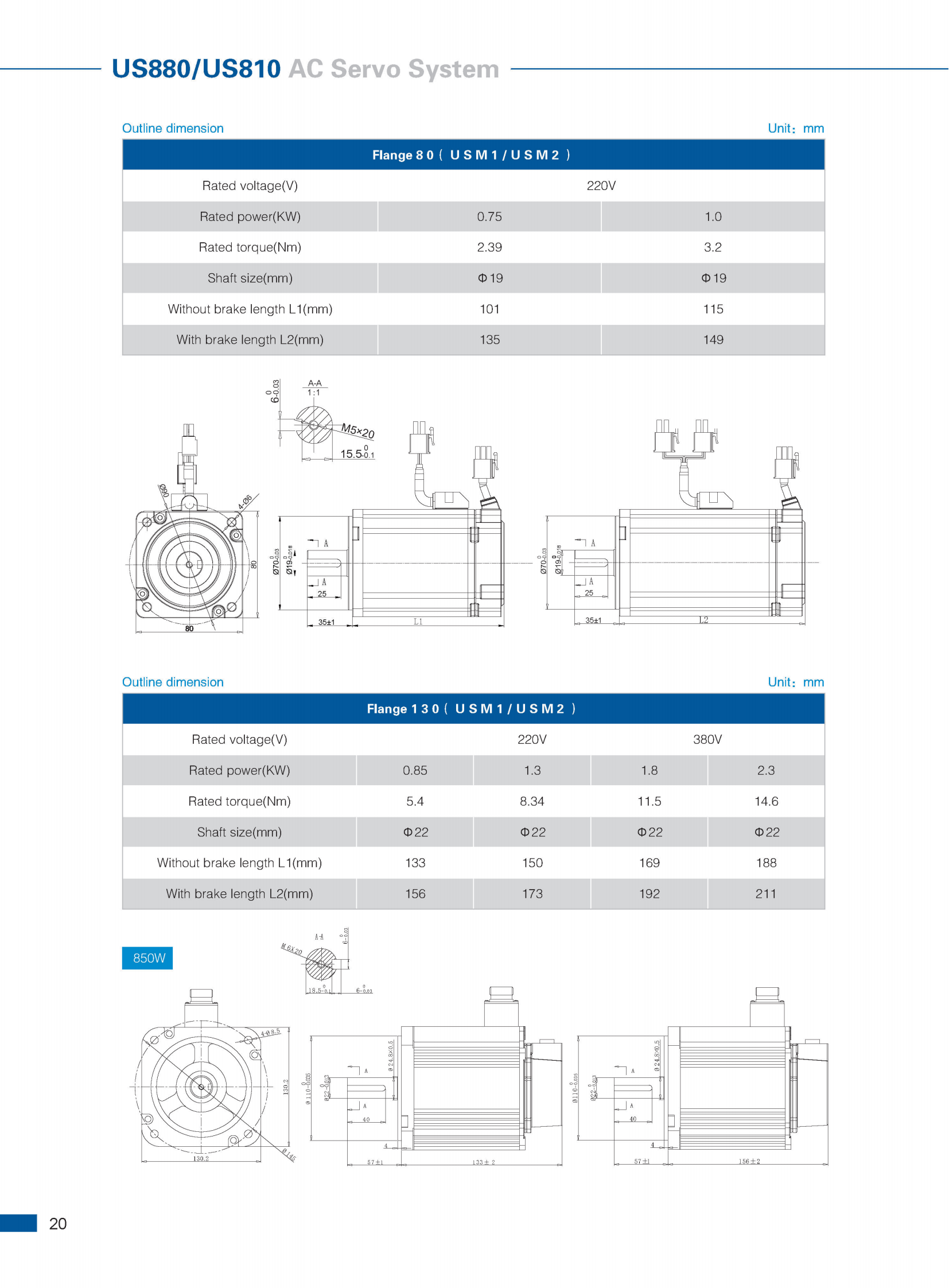
Item | US880/US810 | |||||
Basic | Input power | Control Circuit Power | 1PHAC200V~AC240V 50/60Hz | |||
Main Circuit Power | US880 | US810 | ||||
3PH220V:0.2KW~5.5KW 3PH380V:1.5KW~11KW | 1PH220V:0.2KW~1.0KW 3PH220V:1.5KW~2.0KW 3PH380V:2.0KW~15KW | |||||
Environment Condition | Temperature | Environment temperature 0℃~55℃(without condensing) Storage temperature-20℃~65℃(Maximum temperature 87℃72 hours) | ||||
Humidity | Both using and storage need to keep below 90%RH(without condensing) | |||||
Altitude | Lower than 1000m | |||||
Vibration | Less than 5.88m/S²,10-60Hz(Can not continuous use under resonance frequency) | |||||
Control mode | IGBT PWM type sine wave drive | |||||
Encoder feedback | 24Bit(16777216)Absolute encoder 23Bit(8388608)Absolute encoder 17Bit(131072)Absolute encoder | |||||
Communication | EtherCAT、M3 | Industrial Ethernet bus(COE) | ||||
Operation panel | 1.4 keys 2.LED light 5 bits 3.CPU workable light 4.Vector signal monitor output | |||||
Brake resistor | Built-in regenerative resistor (Can be external) | |||||
Dynamic brake | Built in | |||||
Function | Position control | Signal input | US880 series support EtherCAT.M3 | |||
US810 series support EtherCAT. Pulse signal input | ||||||
Resistance to vibration | Support | |||||
Speed control | Signal input | US880 series support EtherCAT.M3 | ||||
US810 series support EtherCAT. External speed input | ||||||
Zero speed dead zone | According to zero speed dead zone input | |||||
Instantaneous velocity observer | Support | |||||
Speed command filter | Support | |||||
Torque control | Signal input | US880 series support EtherCAT.M3 | ||||
US810 series support EtherCAT .External torque input | ||||||
Common use | Protection | Hardware error | Over voltage, under voltage, over speed, overload, over heat, over current, encoder fault | |||
Software error | Position deviation too large, command pulse frequency division, EEROM fault | |||||
Alarm data track | Refer to alarm data list | |||||